联系我们
与泰克代表实时聊天。 工作时间:上午 9:00 - 下午 5:00(太平洋标准时间)。
致电我们
工作时间:上午9:00-下午5:00(太平洋标准时间)
下载
下载手册、产品技术资料、软件等:
反馈

汽车
以太网
了解如何:
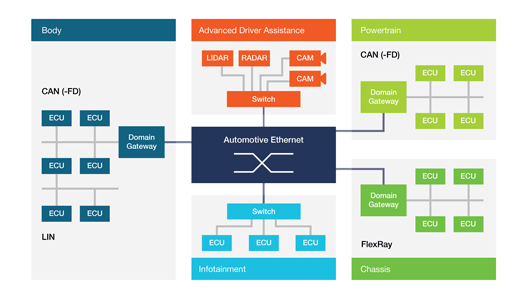
当今的汽车会产生和传输大量数据,以便实施高级驾驶员辅助系统 (ADAS)、车载诊断系统、摄像头和传感器、车载信息娱乐系统和智能安全系统。这些车载网络要求的速度比过去使用 CAN/CAN-FD、LIN、FlexRay、SENT、PSI5 和 CXPI 网络等总线可能达到的速度要快得多。
此外,提高汽车子系统间集成度的要求也推动基础架构发生变化,并以可扩展架构和复杂拓扑为重点,包括连接骨干网络的网关。
除了技术要求之外,这些车载网络还需要重量轻、成本效益高,并能在恶劣条件和广泛的温度范围内运行。它们还需要非常可靠,尤其是用于保护乘客安全的系统。
车载以太网可以满足所有这些需求。
什么是车载以太网?
车载以太网是一种高速、低延迟的网络物理层。车载以太网基于成熟的以太网标准,经调整后适用于汽车。 它使用单对非屏蔽双绞线,重量轻、成本低。它旨在实现车载模块之间的大量数据传输,以支持现代动力系统、ADAS、信息娱乐和舒适系统。目前有几种不同的车载以太网标准,包括100BASE-T1、1000BASE-T1和多千兆车载以太网10GBASE-T1,最后一种的数据传输速度可从100 Mb/s到10 Gb/s。
车载以太网的优点
车载以太网具有许多优点,包括
- 高数据速率可实现高速、大容量数据通信
- 低延迟,可将ADAS等实时系统的延迟降至很低
- 可靠性高,具有良好的抗噪能力
- 布线重量轻、节省空间、成本效益高
- 基于知名标准机构的成熟标准
此外,车载以太网是一项成熟的技术,可满足负载和集成的需求。与非车载以太网不同,车载以太网电缆使用PAM3/PAM4调制,以实现高数据传输速率和可靠性。虽然CAN、CAN-FD、LIN和其他网络在不久的将来可能仍然适用,但车载以太网传输数据的速度大约是CAN总线的100倍,更适合满足未来汽车网络的需求。
车载以太网标准
随着车载以太网新应用的出现和速度的提高,标准组织发布了汽车制造商及其供应商必须满足的新测试和一致性要求。
电气和电子工程师协会 (IEEE) 推出了基于 IP 的车载以太网 100BASE-T1 (P802.3bw)、多千兆位以太网 (IEEE 802.3ch)、1000BASE-T1 (802.3bp) 和 10BASE-T1S (IEEE 802.3cg) 标准。最近,IEEE 引入了多千兆位以太网 (IEEE 802.3ch) 标准,该标准可通过 PAM4 编码方案以 2.5Gbps、5Gbps 和 10Gbps 的速率运行。
为了确保硬件的互操作性并确保汽车在不同环境和操作条件下安全、可预测的运行,对信号电平、噪声和时钟特性提出了严格的约束。这些标准规定的测试技术尽管对于固定以太网网络已经非常成熟,但会给习惯使用 CAN 和 LIN 等低速串行总线的许多汽车工程师带来全新的设计挑战。
泰克在支持高速串行设计实施和故障排除方面拥有丰富的经验,提供各种仪器和解决方案来帮助工程师测试和验证他们的设计,并确保其符合标准。
验证您的车载以太网设计
原型设备制作完成后,需要测试其与系统的集成度并进行特性检定,以确保其符合规范。
泰克示波器是设计和检定车载以太网的有用工具。
- 通过高级测量和分析工具在不同用例下全面检定
- 幅度和时间测量等自动测量以及统计分析和直方图是开始检查信号质量的好方法
- 眼图是评估 PAM3 信令是否具有噪声和信号完整性问题的最快方法
- 抖动分析工具提供主/从时钟抖动的完整曲线,包括时间间隔误差 (TIE) 和周期间 Rj/Dj 测量,并隔离潜在的误差源
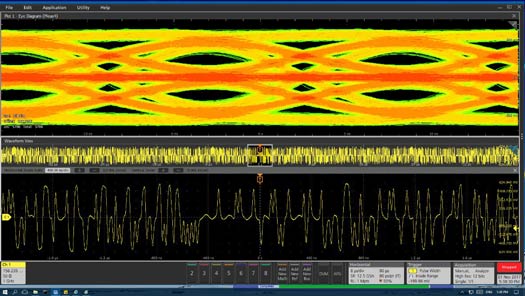
眼图是查看复杂 PAM3 波形的最佳方法
加快车载以太网设计的调试和故障排除速度
预计用于有时失效且需要迅速调试来找出根本原因的复杂网络系统或器件。 车载以太网的较高数据速率和嵌入式时钟对噪声和功率变化比较敏感。
以评估波形作为故障排除过程一部分的工程师经常发现 PAM3 信号比较难调试。 另外,由于车载以太网是一种双向总线,准确捕获有用信号可能极具挑战。
配备高级分析软件的泰克示波器提供您忘记规格标记时快速有效进行故障排除所需的工具。
- TIE 和直方图,对时钟恢复问题进行故障排除
- 眼图,快速评估 PAM3 信号
- 高级抖动分析,通过确定抖动为随机还是确定性抖动来确定噪声源
- 延时触发功能
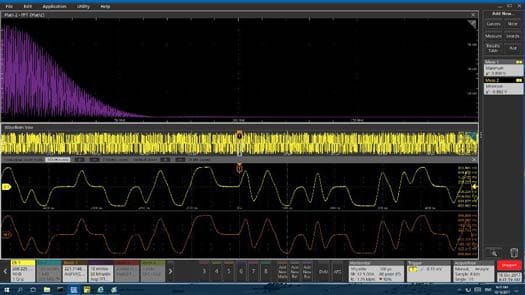
- FFT 分析,隔离干扰源
对复杂系统进行故障排除需要多通道测量和有效的信号完整性工具,例如 FFT 和抖动分析。
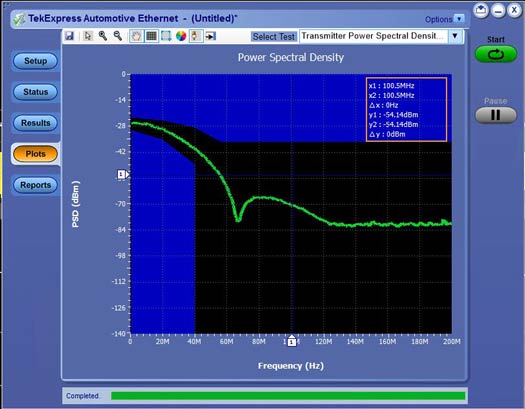
自动测试(例如此功率频谱密度测试)通过比较结果与测试限制值来确定符合标准。
对设计的一致性更有信心
由于子系统在联网环境中的集成度增加,工程师必须提供客观且可以证实的证据来证明:各设备均可交互操作,各电子控制单元(或 ECU)均可与其他 ECU 可靠通信。这些要求也涵盖 ESD 和 EMI/EMC 测试。
但是,在采用更复杂的高速 Mbps 和 Gbps 串行技术时,测试可能极具挑战。
泰克多年致力于进行高速一致性测试并将在较新汽车技术的测试中应用此专业知识。一致性解决方案包括对 100BASE-T1 (802.3bpTM) 以及 BroadR-Reach 或 100BASE-T1 (802.3bwTM) 的支持。最新的法规遵从解决方案适用于千兆以太网(IEEE 802.3ch)和10BASE-T1S(802.3cg)。均满足 OPEN 联盟规定的测试要求。泰克示波器 和频谱/信号分析仪 也可以用于 ESD 和 EMC 测试。
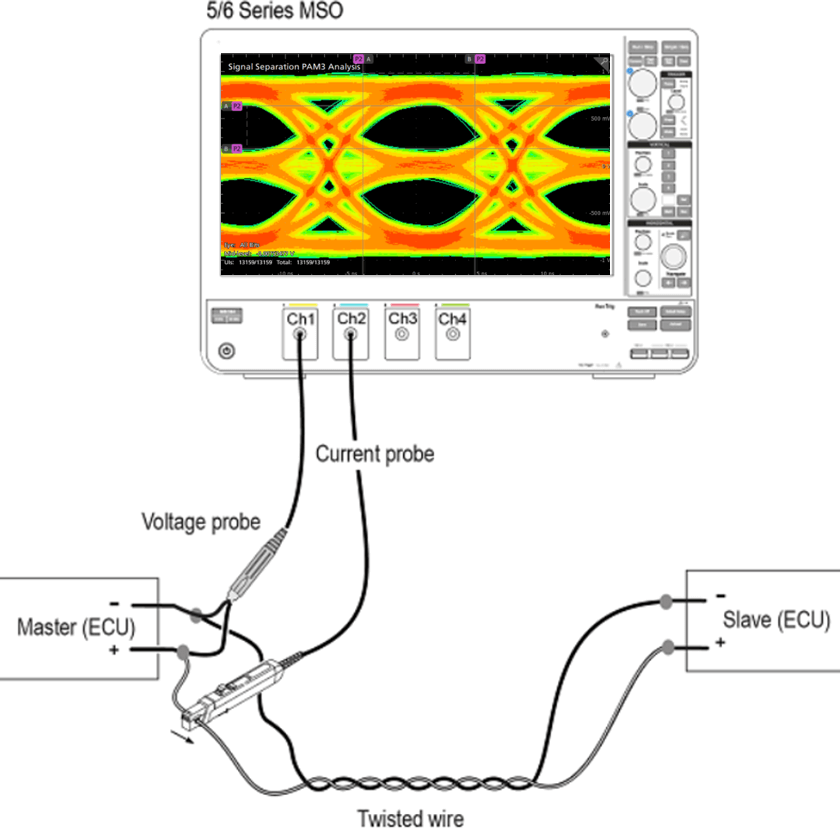
引入信号分离以进行车载以太网测试
从设计到验证再到维护,信号检定和协议测试都是极具挑战性的工作。查看 ECU#1 和 ECU#2 之间的实际数据、评估全双工模式下的信号完整性以及在不断开车载以太网电缆的情况下在系统级别检查协议数据,所有这些任务都会增加测试的复杂性、时间和费用。泰克的独特信号分离解决方案克服了市场上现有产品组合的缺点,使客户能够:
- 在全双工模式下将 ECU#1 和 ECU#2 的流量分开,而无需断开电缆或对车载以太网电缆进行硬件更改
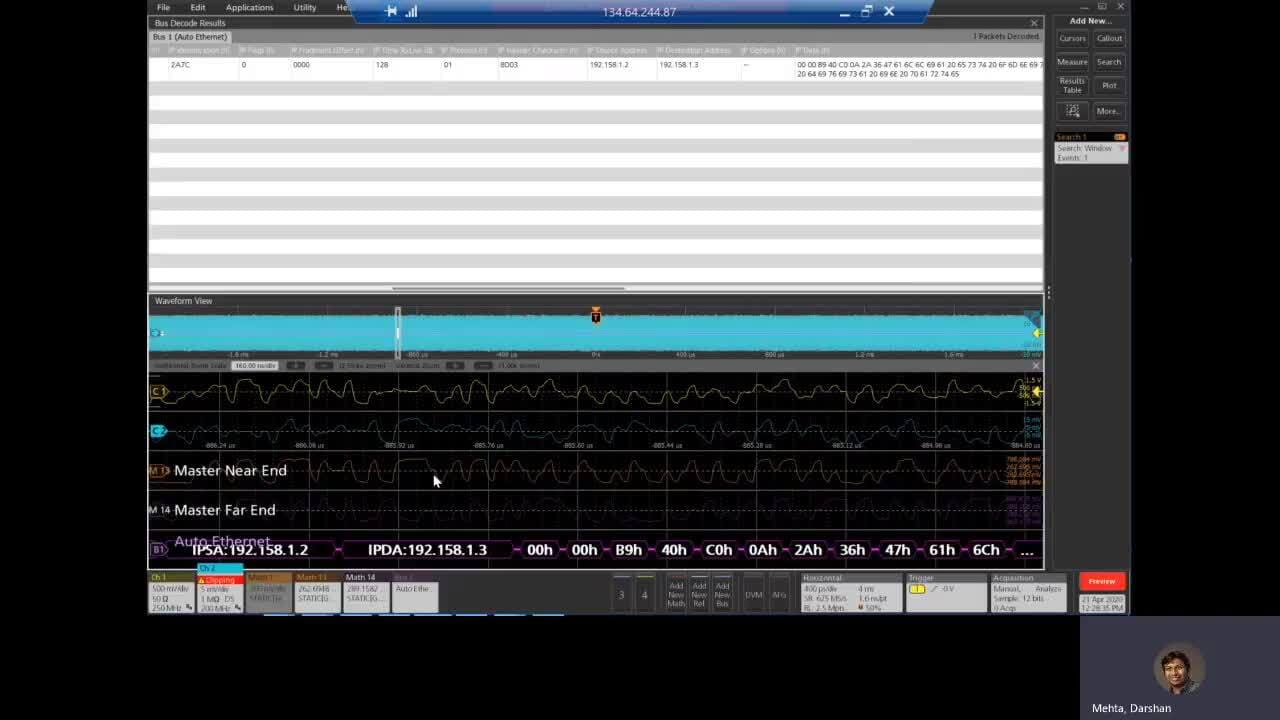
- 同时显示 ECU 1 和 ECU 2 协议解码数据
- 以全双工模式执行协议解码
- 车载以太网 PAM3 和信号分离简介
- 车载以太网:查看真实信号
车载以太网100BASE-T1信号分离和协议解码演示
车载以太网测试解决方案
测试车载以太网设计通常需要使用示波器、相应探头、信号源、软件和相应 测试夹具。为了满足您的需求,泰克提供一系列完整的信号质量和一致性测试解决方案。
| 车载以太网测试 | 示波器 | 软件 | 探头 | 信号源 | 夹具 |
|---|---|---|---|---|---|
| 信号质量测试 (信号分离、协议解码、信号质量和调试) |
  |
选项 5/6 -AUTOEN-SS:信号分离 选项 5/6 -PAM3(车载以太网信号分析) 选项 5/6 -SRAUTOEN1(100BASE-T1 协议解码) 选项 5/6 -DJA(抖动分析) |
|
视 ECU 而定 如需相关信息,请联系泰克 |
|
| OPEN 联盟/IEEE PMA Tx 一致性测试 |
|
选项 5/6-CMAUTOEN10(10BASE-T1S 一致性) |
|
AFG31000 系列(回波损耗) | TF-XGBT |
| 选项 5/6-CMAUTOEN(100BASE-T1/1000BASE-T1 一致性) |
|
AFG31000 或 AWG5200 系列(失真和回波损耗) | TF-XGBT,TF-BRR-CFD | ||
 |
选项 BRR(100BASE-T1/1000BASE-T1 一致性) |
|
AFG31000 或 AWG5200 系列(失真和回波损耗) | TF-XGBT,TF-BRR-CFD | |
 |
选项 AUTOEN10G(多千兆位以太网一致性) |
|
不适用 | PCB S3401 SB 396373*1 |




自动测试软件可以安装到新仪器、添加到现有仪器,或在同一系列的一组示波器中共享。有关更多信息,请联系泰克。
车载以太网资源
车载以太网测试仪器
在其他联网汽车应用中是否面临挑战?
车载以太网常见问题 (FAQ)
为什么汽车中要使用以太网?
因为当今的车辆传输的数据比以往更多,它们需要比过去更快的速度、更多的子系统间集成,以及更复杂的拓扑结构。以太网在满足这些技术要求的同时,还保持了成本效益和轻量化,并能经受住车辆运行时的恶劣条件。
什么是应用于汽车的好选择:CAN 还是以太网?
尽管CAN和以太网都被用于汽车,但以太网正迅速成为首选网络,因为它的速度是CAN的100倍。它还允许更多的子系统间集成。
汽车网络的未来是什么?
随着车载诊断系统、摄像头、传感器以及先进的驾驶员辅助系统、信息娱乐系统和智能安全系统的出现,汽车将继续需要以比之前更快、更可靠的方式传输越来越多的数据。而车载以太网正逐渐成为未来汽车的首选网络。
车载以太网有什么用途?
车载以太网是一种以太网网络标准,用于通过非屏蔽双绞线(UTP)连接汽车内的子系统和组件。它旨在满足汽车市场的需求,包括电气要求(包括 EMI/RFI 辐射)、带宽要求、延迟要求和同步要求。
车载以太网与以太网有何不同?
以太网与车载以太网的区别在于物理层,后者已根据汽车使用案例进行了优化。物理层收发器和电缆经过调整,可使用成本较低的单对双绞线进行全双工通信,而不是双对。
车载以太网的速度是多少?
10Base-T1S是IEEE802.cg 标准中描述的 10Mb/s 车载以太网。
100Base-T1 是 IEEE802.3bw 标准中描述的 100Mb/s 以太网。
1000Base-T1 是 IEEE802.3bp 中描述的 1Gb/s 车载以太网。IEEE 802.3ch 提供三种数据速率: 2.5GBase-T1 为 2.5Gb/s,5GBase-T1 为 5Gb/s,10GBase-T1 为 10Gb/s。
IEEE 802.3cy,速率可达 25 Gb/s